多臂赌博机问题
评估是相对指令而言的。教导式学习的反馈通常是给定什么指令是正确的,而评估式学习的反馈是给定行为的得分。
定义$q_*(a)$是给定选择a的预期奖励。则:
\[q_*(a)\dot =E[R_t\|A_t = a]\]用$Q_t(a)$表示在t回合时动作a的估计奖励。我们希望$Q_t(a)\rightarrow q_*(a)$。若在t回合之前行为a被选了$k_\alpha$次,产生了$r_1,…,r_{k_\alpha}$的汇报,则估计行为值为:
\[Q_t(a) \dot= \frac{r_1+...+r_{k_\alpha}}{k_\alpha}\]$k_\alpha = 0$时,令其默认值$Q_0(a) = 0$,当$k_\alpha$无限大时,由大数定律,$Q_t(a)$收敛到$Q^*(a)$
下面时两种选择规则:
- 贪婪算法:每回合都选最高行为值的行为
- $\varepsilon-greedy$算法:大部分回合以贪婪算法,但以小概率$\varepsilon$选择一个均匀的、独立于行为估计值的随即行为。
下图是原书在概念上区别的通俗解释。
对于行为值方法,若回合无限多,则需要的内存也是无限多。因此采用如下的 增量式 实现:
\[Q_{n+1} \dot= \frac{1}{n}\underset{i=1}{\overset{n}{\Sigma}}R_i = Q_n + \frac{1}{n}[R_n-Q_n]\]对于如上公式,采用如下演化,以适应一个非稳态的情况。
\[Q_{n+1} = Q_n + \alpha[R_n-Q_n],\ 0<\alpha\leq1\]这里将$\frac{1}{n}$变成了$\alpha$,导致不同时期奖励的权重发生变化,即权重根据$1-\alpha$的指数呈指数衰减。
书上提到的步长就是$\alpha_n(a)$参数。随机逼近理论提供保证收敛的条件为:
\[\begin{align*} & \underset{n=1}{\overset{\infty}{\Sigma}}\alpha_n(a) = \infty \ 和 & \underset{n=1}{\overset{\infty}{\Sigma}}\alpha_n^2(a) < \infty&& \end{align*}\]下面介绍另一种动作选择算法:上置信区间 UCB
\[A_t \dot= \underset{a}argmax\left[Q_t(a) + c\sqrt{\frac{\ln t}{N_t(a)}}\right]\]- argmax是当[]的内容取最大值时对应自变量a的值
- $N_t(a)$表示在时间t之前选择动作a的次数
- c 表示控制探索的程度(说是通常设置为2)
- 平方根项是对一个值估计的不确定性或方差的度量
- 总体思想就是后面那一项与这个动作被探索的程度(做过的次数)有关,鼓励开发一些没被探索的动作
说是这个算法在k臂赌博机效果比 $\varepsilon-$贪婪算法 更好一点,但是难以处理非平稳问题和大状态空间时的问题
class UCB:
def __init__(self, n_arms, c=2):
self.n_arms = n_arms
self.c = c
self.Q = np.zeros(n_arms) # 动作的估计收益
self.N = np.zeros(n_arms) # 动作的选择次数
self.t = 0 # 总步数
def select_action(self):
# 计算 UCB 值
ucb_values = self.Q + self.c * np.sqrt(np.log(self.t + 1) / (self.N + 1e-5))
return np.argmax(ucb_values)
def update(self, action, reward):
# 更新动作的选择次数和估计收益
self.N[action] += 1
self.Q[action] += (reward - self.Q[action]) / self.N[action]
self.t += 1
到此对每个特定的动作没有特定的偏好,下面就要对动作加上 偏好 ,表示为$H_t(a)$。需要解释的是:
- 偏好是相对的
- 偏好与奖励无关
在偏好影响下,动作概率 遵循softmax分布:
\[Pr\{A_t = a\} \dot= \frac{e^{H_t(a)}}{\sum^k_{b=1}e^{H_t(b)}} = \pi_t(a)\]$\pi(a)$是选择动作a的概率。通过动作概率的方式,可以平衡了动作探索和回报更大两者之间的关系
def softmax_prob_choose(H)
exp_H = np.exp(H - np.max(H))
action_probs = exp_H / np.sum(exp_H)
return np.random.chioce(len(H), p=action_probs)
动作偏好更新方式如下:
\[H_{t+1}(A_t) \dot= H_t(A_t) + \alpha(R_t - \bar R_t)(1-\pi_t(A_t))\] \[H_{t+1}(a) \dot= H_t(a)-\alpha(R_t - \bar R_t)\pi_t(a)\ , \ for\ all\ a\ \neq\ A_t\]- $\alpha$:步长参数
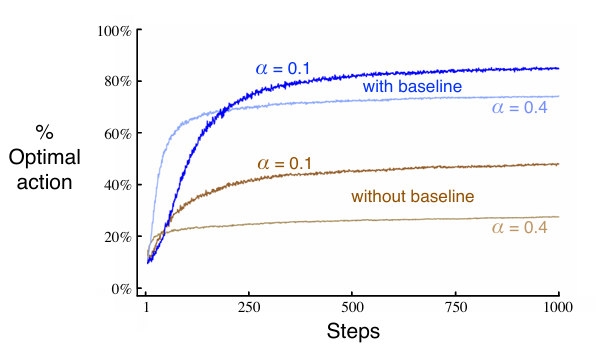
- $\bar R_t$:截至回合t的所有奖励的平均值(包含回合t)。称为 奖励基线 Reward Baseline
原文这里说如果去掉了奖励基线(即将其置为0),算法表现大大降低。
到现在为止只考虑了非关联性任务,还有需要将不同行为和不同情况联系起来的任务,如关联搜索任务。
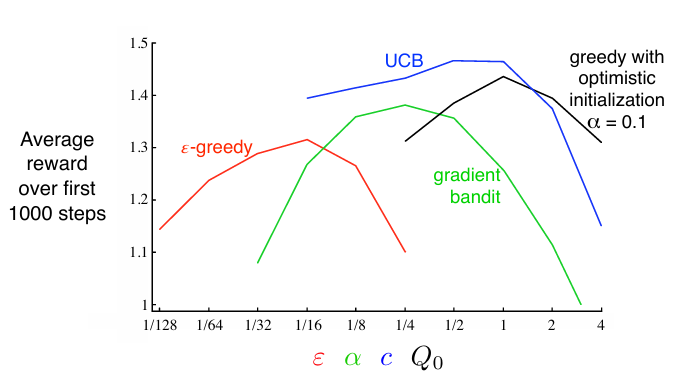
下图是以上提到的几种动作选择算法的比较图:
有限马尔科夫决策过程 Finite Markov Decision Processes
在赌博机问题中,我们估计每个动作的价值$q_(a)$,但在 MDP 中,我们估计关于每个状态中每个动作的价值$q_(s,a)$。
MDP中的学习者和决策者被称为 个体 Agent,其与之交互的东西被称为 环境 environment

对于每个回合t,个体接受环境状态$S_t$,做出动作$A_t$,收到奖励$R_{t+1}$,达到新状态$S_{t+1}$。
对于给定前一状态和动作的情况下,存在下一状态和回报的概率(联合概率分布):
\[p(s^′,r|s,a)\dot=Pr\{S_t=s^′,R_t=r|S_{t−1}=s,A_{t−1}=a\}\]在MDP中,$S_t$和$R_t$的概率仅取决于前一个状态和动作,不依赖于先前的状态和动作的话(状态必须包括有关过去的个体-环境交互的所有方面的信息),就说该状态具有 马尔可夫性 Markov property
通过该联合概率分布可以计算出任何想知道的关于环境的其他信息,如:
- 状态转移概率 $p(s’|s,a) \dot= \underset{r\in R}{\Sigma}p(s’,r| s,a)$
- 预期奖励$r(s,a)\dot=\underset{r\in R}{\Sigma}r\underset{s’\in S}{\Sigma}p(s’,r|s,a)$
- 对下一指定状态的预期奖励$r(s,a,s’)\dot =\underset{r\in R}{\Sigma}r\frac{p(s’,r|s,a)}{p(s’|s,a)}$
目标的定义:目标可以被认为是所接收的标量信号(称为奖励)的累积和的预期值的最大化。
对于一个目标,在最简单的情况下,收益应该为奖励的总和:
\[G_t\dot=R_{t+1} + R_{t+2} + R_{t+3} + ... + R_T\]当一个任务可以被分解为小任务时,每个小目标被称为 情节 Episodes。因此强化学习任务可以被分成两种:情节任务和连续任务下面是这两个任务的区别:
| 特性 | 情节任务(Episodic Tasks) | 连续任务(Continuing Tasks) |
|---|---|---|
| 任务结构 | 划分为多个独立的情节,有明确的开始和结束 | 时间步无限延续,没有明确的情节划分 |
| 时间范围 | 有限时间步 | 无限时间步 |
| 回报定义 | 当前情节内的累积奖励 | 无限时间步的衰减累积奖励 |
| 目标函数 | 最大化每个情节的累积奖励 | 最大化长期累积奖励 |
| 环境重置 | 每个情节结束后环境重置 | 环境不会重置 |
| 算法设计 | 适合蒙特卡罗方法 | 适合时序差分方法 |
| 应用场景 | 游戏、实验性任务 | 机器人控制、自动驾驶、资源管理 |
| 值函数定义 | 当前情节内的期望回报 | 无限时间步的衰减期望回报 |
| 策略评估 | 基于完整情节回报 | 基于实时交互 |
| 探索与利用 | 可以在不同情节中尝试不同策略 | 需要在同一任务中平衡探索与利用 |
在一个任务中,非终了状态的集合为$S$,包括终了状态的所有状态表示为$S^+$,终止时间为$T$。
当存在时间无线的任务时,未来的回报将无法收敛,因此引入了衰减因子$\gamma$。衰减回报为:
\[G_t\dot =R_{t+1} + \gamma R_{t+2} + \gamma^2 R_{t+3} + ... + ... = \underset{k=0}{\overset{\infty}{\Sigma}}\gamma^kR_{t+k+1}\]衰减因子降低了未来奖励的现值使个体更加短视。
下面介绍 策略函数 policy function:如果个体在时间t遵循策略$\pi$,则$pi(a|s)$是如果$S_t = s$,则$A_t = a$的概率。策略函数本质上就是条件概率的集合,将所有的状态映射为每个动作的概率。
在状态为s、策略为$\pi$下的 状态价值函数 state value function 表示为$v_\pi(s)$,是从开始并之后遵循策略$\pi$的预期收益。
\[v_\pi(s) = \dot =E_\pi[G_t\|S_t = s] = E_\pi[\underset{k = 0}{\overset{\infty}{\Sigma}}\gamma^kR_{t+k+1}\|S_t = s]\]定义策略$\pi$的 动作-价值函数 action-value function
\[q_\pi(s,a)\dot=E_\pi[G_t\|S_t = s,A_t = a] = E_\pi[\underset{k=0}{\overset{\infty}{\Sigma}}\gamma^kR_{t+k+1}\|S_t = s,A_t = a]\]三者之间的关系为
\[v_\pi(s) = \underset{a}{\Sigma}\pi(a\|s)q_\pi(s,a)\]即状态价值函数是行动-价值函数在策略下的加权平均。
下面介绍 蒙特卡洛方法 Monte Carlo methods :是一种估计方法,通过与环境交互,生成完整的情节,利用情节的奖励序列直接估计出值函数(q和v),然后基于估计出的值函数改进策略。这在后面会详细描述。
在强化学习和动态规划中的价值函数满足递归行,因此可以用如下方程表示,称为 贝尔曼方程 Bellman equation,表示了状态价值与下一个状态价值的关系
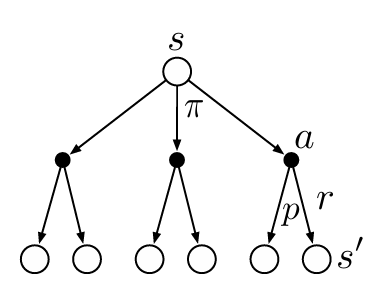
\[v_\pi(s) = \underset{a}{\Sigma}\pi(a\|s)\underset{s',r}{\Sigma}p(s',r\|s,a)[r+\gamma v_\pi(s')]\]以下图为例,假设当前状态为s,在策略$\pi$下有三个可能的动作,经过这三个动作后在环境的影响下分别可能到达后面的六种状态,导致下一个状态,即$s’$有六种可能。贝尔曼方程就是对所有可能性进行平均,通过其发生的概率进行加权。它指出,开始状态的值必须等于预期的下一个状态的(衰减)值,加上沿途预期的奖励。
同理,动作价值的贝尔曼方程为:
\[q_\pi(s,a) = \underset{s',r}{\Sigma}p(s',r\|s,a)[r+\gamma\underset{a'}{\Sigma}\pi(a'\|s') q_\pi(s',a')]\]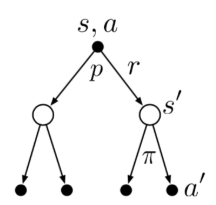
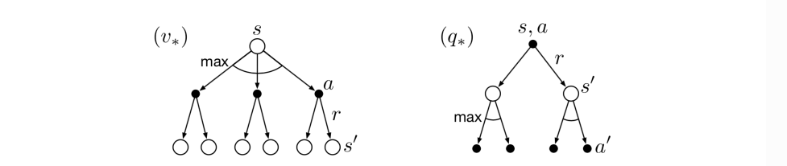
评判一个策略的好坏可以使用策略价值函数。当价值函数取最大值时,此时所采用的策略称为 最优策略,此时的最优策略价值函数为:
\[v_*(s)\dot=\underset{\pi}{\max}q_\pi(s,a)\]最优策略还具有相同的最优动作价值函数:
\[q_*(s,a)\dot=\underset{\pi}{\max}q_\pi(s,a)\]在最优的情况下,两个价值函数的贝尔曼方程都具有唯一解,即
\[v_*(s) = \underset{a}{\Sigma}\pi(a\|s)\underset{s',r}{\Sigma}p(s',r\|s,a)[r+\gamma v_*(s')]\] \[q_*(s,a) = \underset{s',r}{\Sigma}p(s',r\|s,a)[r+\gamma\underset{a'}{\Sigma}\pi(a'\|s') q_*(s',a')]\]均具有唯一解
对于有限MDP问题,如果有n个状态,就有n个贝尔曼最优方程。解这个最优方程组,可以获得最优策略对应的最优策略价值$v_$,查询一步(按照价值最大的动作)可以得到最优的决策动作。而计算$q_$甚至能不需要查询动作,最优动作价值直接缓存了查询的结果。从最优策略价值函数获得当前状态的最优策略实现步骤为:
- 对于当前状态s,便利所有可能的动作a
- 对于每个动作a,计算其对应的期望价值:
- 选择使$Q(s,a)$最大的动作$a^*$